Hi, my name is
Anmeet Sekhon
I am a Mechatronics Engineer passionate about robotics, machine learning, and embedded systems. In addition to creating aesthetic & functional machines and web applications, I'm currently working on a robot!//About Me
<h3>
Hey! I'm Anmeet, a Mechatronics Engineering student @ UW and I enjoy creating things that can make my life easier. My interest in software development started back in 2018 when I decided that it would be cool to make a game on Scratch. In doing so, I was consumed by the idea that I could create software not only for my entertainment, but also to automate tasks for myself. So, I set out to make an automated light switcher.
Turns out, my interest in creating software never went away! Instead, it grew into a deep interest of all things embeded systems, (Mechanical, Electrical and Software Design). Fast forward to today, and I've developed a foundation in software development, mechanical design, and web development allowing me to effectively bridge the gap between programming, mechanical design, and the forefront of technology.
These days, I'm focused on creating custom machines to automate tasks. Additionally, I'm exploring the world of AI and Machine/Deep learning to create intellegent machines. I also recently received certifications for completing machine/deep learning courses from Mathworks!
Hey! I'm Anmeet, a Mechatronics Engineering student @ UW. My journey in software began in 2018 with a simple game I made on Scratch, sparking a passion of all things embeded systems, (Mechanical, Electrical and Software Design).
Fast forward to today, and I've developed a foundation in software development, mechanical design, and web development allowing me to effectively bridge the gap between programming, mechanical design, and the forefront of technology.
These days, I'm focused on creating custom machines to automate tasks. Additionally, I'm exploring the world of Machine/Deep learning to create intellegent machines. I also recently received certifications for completing machine/deep learning courses from Mathworks!
</h3>
Here are some of the tools and software I've recently worked with:
- C++ / C / Java (OOP)
- Matlab (Machine / Deep Learning)
- Python (OpenCV, Pytorch)
- Javascript / Typescript
- React.js / Next.js
- SolidWorks

//My Experiences
- WE Accelerate
- Inqsys Technologies
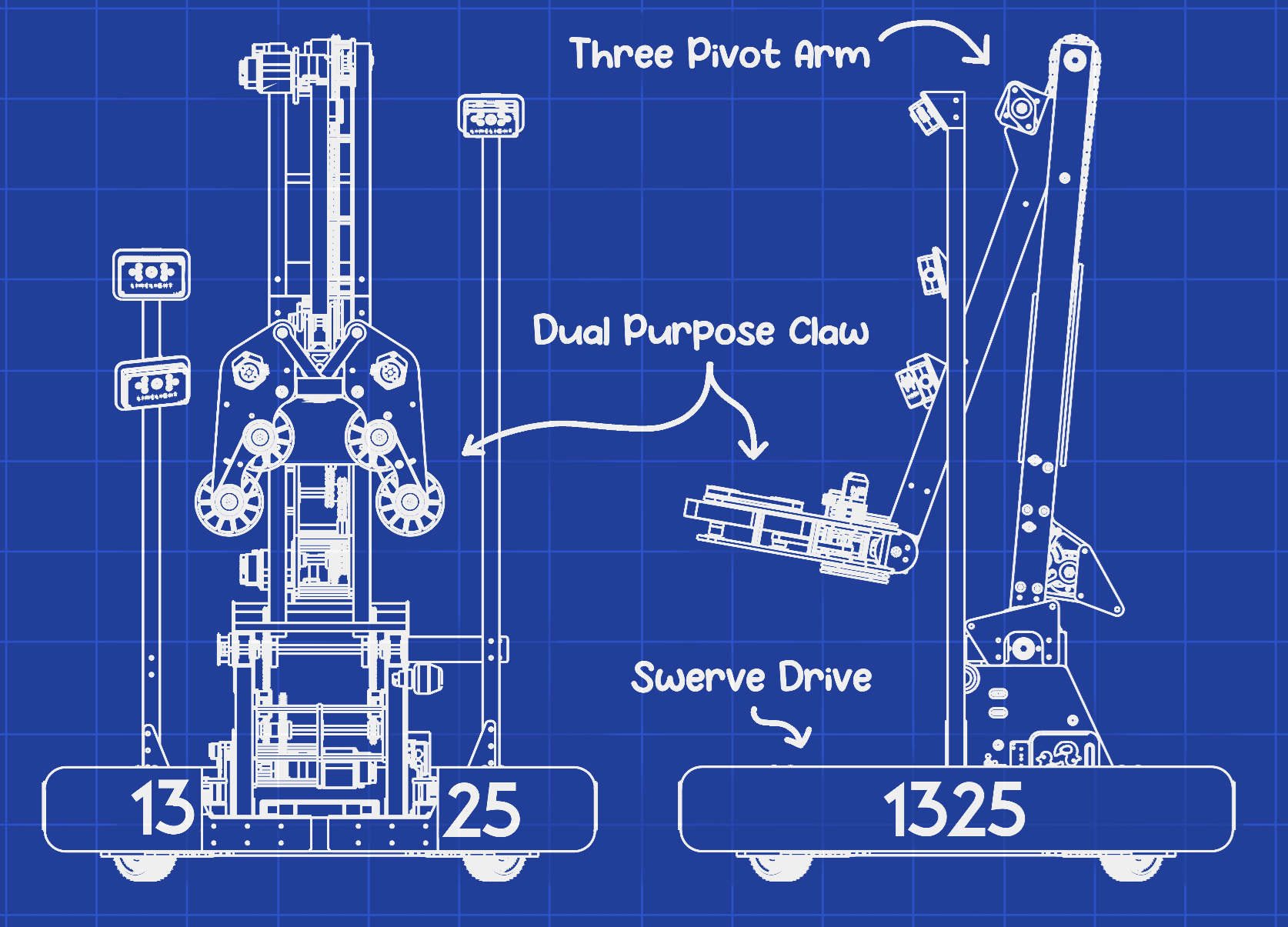
- FRC Team 1325
- WebPulse Canada
//Projects
//Projects
More Projects
//Contact Me
I'm currently open for any new work opportunities. Whether you have a question or just want to say hi, reach out to me and I'll be sure to get back to you!Any feedback for the website is greatly appreciated!Made by Anmeet with ❤️ & ☕